- An efficient framework that can achieve robust and long-term localization, given a floor plan as prior, without being affected by position-available objects. This framework provides a good case study on how to fully utilize prior information for localization.
- FP-Recov: A simple and effective algorithm for extracting semantic information from floor plan images.
- Flood Fill: A plane
segmentation algorithm
for lidar point clouds designed for floor plan matching.
FloodFill Algorithm on LiDAR PointCloud - ANNF: A novel data structure in the form of an approximate nearest neighbour field (ANNF) which enables an efficient look-up of the nearest geometric floor plan elements (e.g. wall segments) for any given point in the localization space.
- Clutter Dataset Toolbox: A toolbox integrates a pipeline
that transforms a floor plan into an indoor lidar point cloud dataset with clutter.
Clutter Dataset Toolbox
FP-Loc 2.0
A Floor Plan Assited Localization Framework
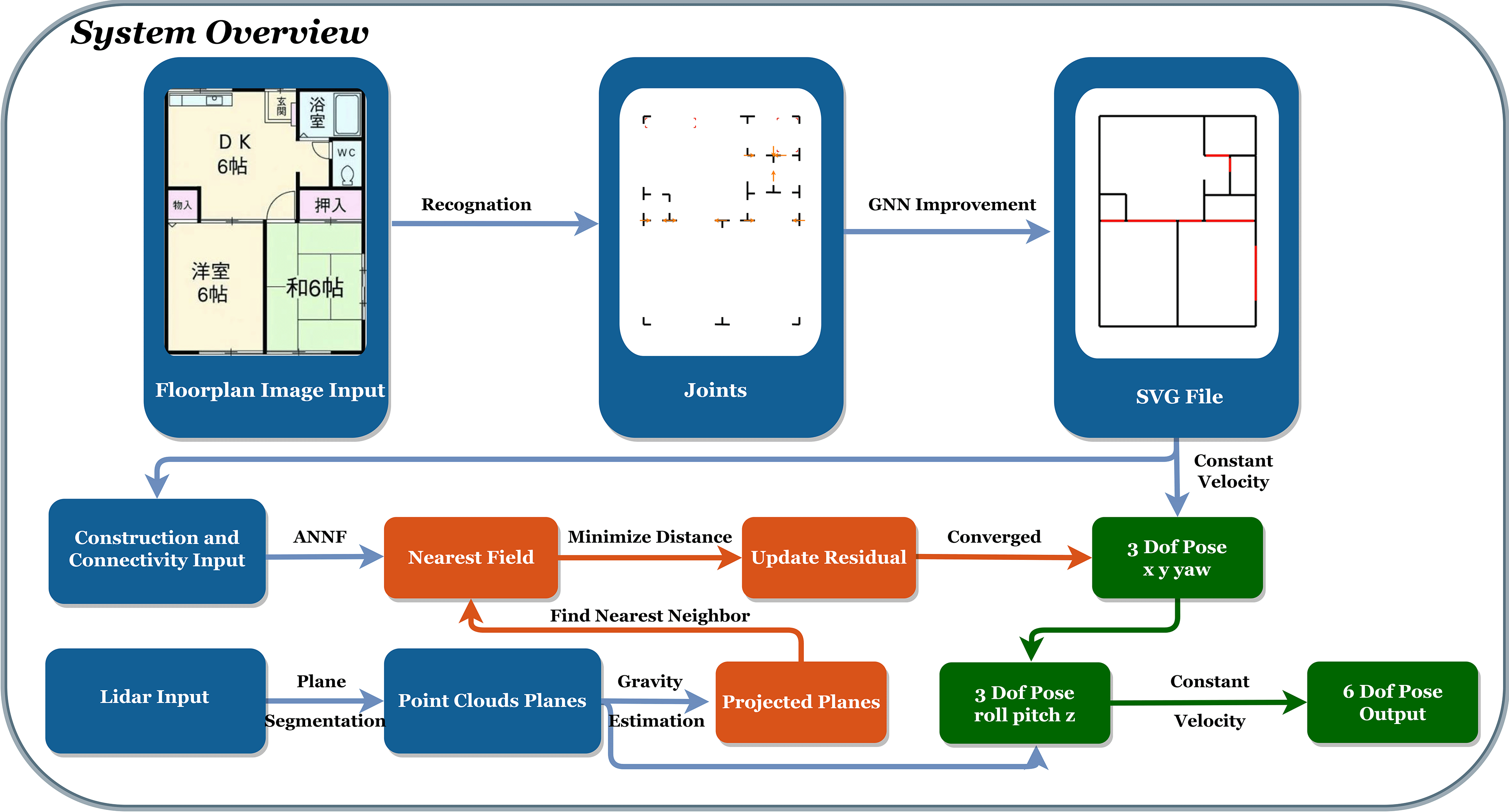
The Framework
Given a floor plan, we can perform long-term localization without being affected by
position-available furniture. First, we use FP-Recov to
recover semantic information from the given floor plan image and
convert it to Scalable Vector Graphics (SVG) format.
Then, we construct an ANNF
to quickly find the nearest neighbor geometric element.
At the same time, we use Flood Fill
to segment the point cloud data and obtain usable planes.
We use these planes to predict and maintain gravity,
calculate the 3-DOF pose, perform matching with the ANNF
to obtain the other 3-DOF pose, and finally perform joint optimization.
Citation
Please cite the following publication when using this project in an academic context:
FP-Loc: Lightweight and Drift-free Floor Plan-assisted LiDAR Localization
L. Gao, L. Kneip
International Conference on Robotics and Automation (ICRA), 2022
[Arxiv]
[YouTube]
[BiliBili]